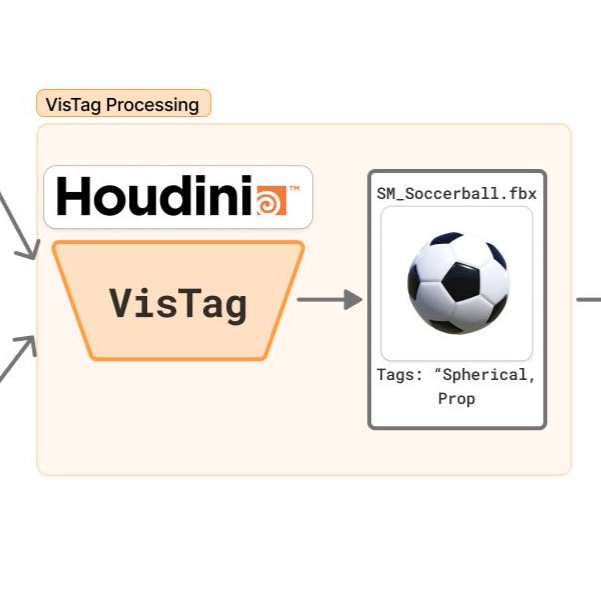
Blog Intro Welcome to this new blog series where I’ll be covering the development of VisTag. Now what that is and how it will work will be explained below. I’ll be posting development update as they come up. You can find updates to the project on my GitHub Stated Goal The goal of VisTag is […]
Categories
VisTag – Dev Diary v.1